Alvin: prapředek samořídících aut
Samořídící auta nám stále připadají trochu jako hudba budoucnosti – přitom první prototyp tu jezdil již v roce 1989. To je ALVINN.
https://www.theverge.com/2016/11/27/13752344/alvinn-self-driving-car-1989-cmu-navlab
První pokusy o samořídící auta lze datovat až do 20. let 20. století, kdy firma Houdina Radio Control představila modifikovaný vůz 1926 Chandler, který byl ovládán na dálku přes rádio v jiném autě. Dalším pokrok učinily RCA Labs v roce 1957, kdy výzkumníci experimentálně zapustili do dálnice dráty, které detekovalo zařízení v autě a udržovalo díky nim směr. Na takové pokusy navázala v 60. letech Británie, když zkoušela Citroen DS bez řidiče na dálnici, pod níž byly položené magnetické kabely. Teprve v 80. letech se však dostalo na auta, která by byla řízena skutečně sama, tj. bez vodicích kabelů či rádiového operátora.
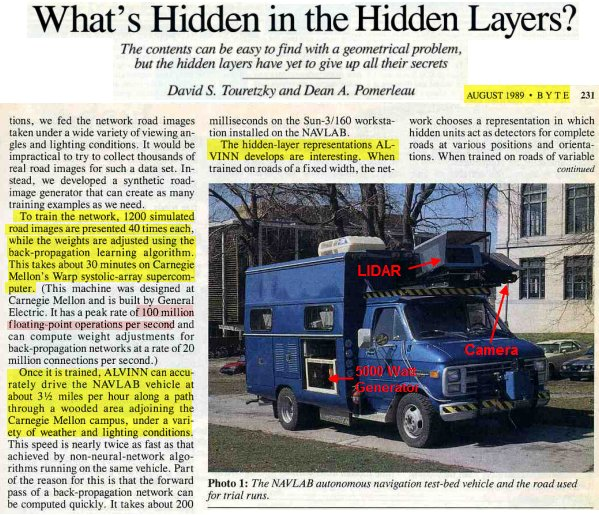
Výzkum na počítačem řízených vozidel začal na Univerzitě Carnegieho Mellona v roce 1984 s názvem “projekt ALV (Autnomous Land driven Vehicle) a výroba prvního vozidla byla zahájena v roce 1986. Tak vznikl ALVINN, což je zkratka pro Autonomous Land Vehicle In a Neural Network (Autonomní pozemní vozidlo s použitím neuronové sítě), který byl používán jako testovací vozidlo až do 90. let (zdroj: The Verge).
Srdcem AVINNu byl analogový počítač o velikosti lednice a výkonu 100 megaflop/sekundu, což je okolo jedné desetiny výkonu zařízení Apple Watch. Zároveň byl vybavený lidarem, čili laserem, který měří vzdálenosti a dalšími senzory, díky nimž ALVINN “viděl”. Počítač porovnáváním obrázků (které získával ze senzorů) s naučenými daty následně vyhodnocoval, jestli zatočí či pojede nadále rovně. Tato rozhodnutí činil tak, aby zůstal uprostřed vozovky.
Význam projektu ALV tkví v tom, že k samořídícím autům nepřistupoval čistě mechanicky, ale stavěl na základech strojového učení. Strojové učení probíhalo přímo v akci, tzv. “on the fly”. Tedy tréninkové schéma, ve kterém je neuronová síť trénována na skutečné situaci při řízení vozidla člověkem. Trénink se tudíž provádí online, s použitím dat, která se sbírají za jízdy. (zdroj: Vision for Mobile Robot Navigation: A Survey, G.N. Desouza).
Protože byl výkon počítače omezený, ale zároveň bylo třeba provést velkou řadu výpočtů, aby auto zatáčelo správně, bylo v první jízdě omezené na maximální rychlost pouhých 3,1 km/h. Tímto způsobem v Pittsburghu ALVINN najel 600 metrů v “ostrém provozu” – bez pomoci lidské osádky, volant auta zatáčel v ulicích sám.
V dalších pokusech se výzkumnému týmu podařilo dostat dokonce na 31km/h, a projekt ALV tak položil základy dnešních strategií samořídících aut postavených na strojovém učení a neurálních sítích (viz přečtěte si také: Neurální sítě z minulého týdne)